Methods of Solving Dynamics Problems for Non-Engineers
By Joel Jackson
This website will show an average college student two ways to solve complex Dynamics problems. The first way we are going to solve this problems is through basic methods acquired from our dynamics class. We will explain these methods in a way that a regular college student could understand them. This process is complicated, so my second method of showing someone to solve complex problems is through a program called Working Model. This program allows a person to set up a simulation of a problem on the computer and change its conditions, and then the program will compute a solution to your problem.
There are two problems that I will solve for demonstrational purposes. One will be a problem that was previously assign to me is class. That problem will solve using normal dynamics method and by using Working Model. The second problem will just be solved by Working Model, and it will be a problem that has real world applications.
Problem 13.174
A 1-kg block is moving with a velocity of magnitude of 2 m/s as it hits the 0.5-kg sphere A, which is at rest and hanging from a cord attached to O. Knowing that the coefficient of kinetic friction is 0.6 between the block and the horizontal surface and the e = 0.8 between the block and the sphere, determine after impact (a) the maximum height h reached by the sphere, (b) the distance x traveled by the block.
(Beer, Johnston Vector Mechanics for Engineers- Dynamics)
How To Solve:
Dynamics Method:
First consider our given conditions:
Mass of the Block = mb= 1.0 kg Initial Velocity of Block = vb = 2.0 m/s
Mass of the Ball = ma = 0.5 kg Coefficient of Kinetic Friction = uk= 0.6
Coefficient of Restitution = e = 0.8 Gravity = g = 9.81
m/s2
Now you must find the forces that are acting on the block. There is a force due to gravity coming straight down from the block this denote mg. Another force that is action on the block is the normal force (N) that is pointing up at a 90-degree angle to the block. The final force is the frictional force that is opposing the movement of the ground. Next we must draw an inertia diagram that shows the inertia force vectors that cause the system to be at dynamic equilibrium.
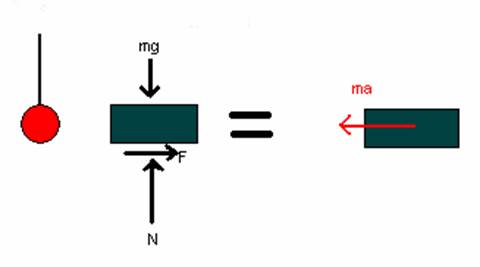
Now all the forces that we drew in the free body diagram must be put together in a sum of X-axis components and Y-axis components.
∑ Fx = Ff = mba
Given Equation for friction-
Ff = ub *N
∑ Fy = N-mb g = 0
N = mb g
So now you must put both equation together to
solve for the acceleration ( a )
ub * mbg = mba
a = ub* g
We can solve for a because we have ub and g stated as givens so substitute them in
a = 0.6*9.81
a = 5.88 m/s2
We have found the acceleration equation we must put that aside, for we will use it later.
Now we should proceed to solve part “a” of problem 13.174
To find the ratio of velocities we can use a helpful equation for the coefficient of restitution (e)
e = (vb2 –va1)/ (va –vb)
The va and vb are the velocities of the block and ball originally, which are given. The va2 and vb2 are the final velocities of the block and ball. We know that the va is zero because it starts off a rest.
Substitute in the given values:
va2 –vb2 = 0.8 ( 0- 2 m/s)
vb2 –va2 = -1.6 m/s
vb2 = va2 – 1.6
Another helpful equation that will be used is the Conservation of Momentum Equation:
mava + mbvb
= mava2 + mbvb2
Again we know va and vb are the velocities of the block and ball originally, which are given. The va2 and vb2 are the final velocities of the block and ball. We know that the va is zero because it starts off a rest.
0 + 1kg * 2 m/s = 0.5 kg*va2 + 1 kg *vb2
vb2 = 2- 0.5*va2
Substitute in vb2
1.5 va2
= 3.6
va2=
2.4 m/s
vbs =0.8
m/s
Now since we have found the final velocity of
the ball we can find the maximum height by using the equation that max
potential (where the height is max) equal maximum kinetic energy.
mgh = 0.5*mv2
h = v2/
2g
h = 0.2936 m
Finally to solve part “b” of the problem you
must use the formula for uniform accelerated rectilinear motion:
vf2
= vo2 + 2a( xf –xo)
The Final velocity of the block is zero
because it comes to rest and the acceleration found previously in our work.
a = 5.88 m/s2
0 = 0.82
+ 2(5.88) *(Δ x)
Δ x = 0.0544 m
Working
Model Method:
To solve this problem on working model, I first constructed the model that is similar to the one given to the book. I gave the objects the same initial conditions that were given in the book. Well when you run this system it seems like it is going fine, but there are not any results to your questions. This is where you must play with working model a little bit. I created measuring devices that calculate the change of distance in the x-direction that the block traveled and the distance the ball traveled in the y-direction. To find the max height of the ball just find the original point of ball and subtract it from the point when the ball is at its highest point. To find the distance traveled by the block, you have to find original point on the x-axis subtracted by the point on the x-axis where the ball came to rest.
My results on Working Model:
Xo= 6.15 m Xf = 6.076 m
ΔX = 0.076 m
Yo= -3.55 m Yf = -3.28 m
ΔY= 0.27 m
To try this for yourself go to the following link:
Conclusion of Part 1:
There was a small difference in the answer I got in part by doing the problem by hand and Working Model. I think this is because I use a different gravity force then the program use in their calculations. We used g = 9.8 m/s2 and they used g = 9.807 m/s2, this could be the result of our errors.
Second
Problem:
The second problem is a more real world applications and could help people understand the principals of dynamic in everyday life. I chose the following problem because this situation could benefit many people and has affected me on a personnel level. If you have ever been to a Nebraska Cornhusker football game you have noticed that there is one man of all the 78,000 in capacity that everyone has their eye one. This noble person is the Fairbury Viener Slinger Man. He is the guy who shoots Fairbury hotdogs in to the crowd of hungry fans. How does this guy know how fast to shoot these hotdogs to allow them to reach the fans in the stands?
Problem:
Lets say that the Viener Slinger Man comes up
to me and says, “ Joel, I am really having a problem shooting my hotdogs 13.5
meters high, when I am 34 meters away. Last game I missed I guy who was approximately
that far away. This caused the crowd to become distraught and indirectly caused
the Huskers to lose to Colorado.” I would say, “ Excuse me Mr. Slinger, but
have you consider that the air resistance and wind could play a factor?” He
would tell me no because we were in an idea world. So I would then decided to
help him.
I would then take him to room 308 in the Walter Scott Engineering Building and give him a first class lesson of projectile motion on the Working Model. First I would set up a simulation much like the one he experiences everyday. I would set a target that is 13.5 meters away with a height of 34 meters. I didn’t know, but he told me that the hotdogs that he fires weigh approximately a quarter pound. I did the math and calculated that to be about 0.1136 kg. With all these conditions set he play with the program until he found the right initial velocity that would be need to hit his target.
To Try:
1) Adjust the x and y velocities on the velocity panel
2) Your x any y velocities should be the same because the Viener Slinger Man likes to shoot his Fairbury hotdog at a 45-degree angle
3) You can turn the tracking on or off to follow the projectile motion
Conclusion:
I found out by testing that the projectile would hit its target if it were shoot an initial velocity of 17.0 m/s to 17.9 m/s. This is if the angle it is shoot at is 45-degrees, which is the preferred angle of the Viener Slinger. As you can see the Dynamics problem are very difficult and time consuming, but if you have Working Model it allows interactively solve these problems.